水越広樹です。
前に新メンバーとして紹介されていた様に、新人ですから室内飛行ロボコンの知識は他のメンバーには一歩及ばず……。
そんな訳で、とりあえず自分でも出来そうな仕事として、私が管理することになりました。
さて、前回の会議で♯3の設計をした訳ですが、その後いろいろな変更や事件が発生しました。
まず問題発生、現在の搭載機器(モーター、バッテリー等諸々…)の重量を考えると、どうも最軽量が難しい。
メンバー間では最軽量を目指すと言うコンセプトを、妥協しなくてはならないと言う考えも出ています。
新しいコンセプトを考えなくてはいけない様です。
それは近日中に発表することにしましょう。
続いて、大きな変更点があります。
♯3まではモーター出力とラダー角度の二つの操作を、二つのチャンネルで操作する予定でした。
しかし、21日の会議で新たにエレベーターを装備した、♯4を製作することになりました。
←ジョイフル♯4
ジョイフルシリーズでは初めての動力飛行ができます。
♯2と♯3は設計図だけでしたので。
これはプロペラ回転数の変化だけで、機体の高度を操作させるのと違い、
エレベーターを装備した♯4はピッチ操作が出来るため、機敏に動けると思われます。
つまり、操作しやすくなって、初心者でも手軽に飛行機を飛ばせると言うことです。
私たちにはちょうどいい訳です。
ただ、エレベーターを付けるためにサーボを新たに付けなくてはならず、重心などの変化から、
重心計算をやり直さなくてはなりません。
また、ピッチの変化が大きくなることが予想されるため、カメラの角度もピッチとともに変化してしまいます。
これはカメラの撮影角度も変化する事になり、結果、観測者(私ですが)にとっても観測しづらくなる事になります。

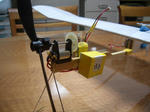
←分かるでしょうか?
二つのサーボがそれぞれ翼上面と下面にあります。
上がラダー、そして下が新装備、エレベーターのサーボです。
今、ジョイフルは大きな転換をしています。
そのジョイフル♯4は24日に完成予定です。これも詳しい事は近日中に書くことにします。
そして最後に事件発生
21日、某模型屋に電子機器を持って行く最中、バッテリーがショート!
バッテリーは電圧は保ってはいるものの、このまま使うには危険!
仕方がないので新しくバッテリーを購入する事に……。
一応、他の機器に影響は少ないようだったので、安心しましたが、気を付けなくてはいけませんね。
今回はここまで。
ではでは。
PR




